
各论坛中牛反光轴调节教程很多,RC教程却很少,最近GSO的RC8价格腰斩遂入坑RC,搬运一篇牧夫上转载的RC光轴教程。
本文件描述了准直RC和其他卡塞格林望远镜的程序。该过程简单,不需要副镜中心标记或准直望远镜。该程序基于消除轴上慧差和离轴散光的迭代过程。一切都是通过在焦外拍摄的图像来完成的。
传统准直方法
作为比较,我们简要介绍了准直 Ritchey-Chrétien 瞄准镜的传统方法。更详细的解释可以在其他地方找到。
传统的方法是两步法。首先,通过将副镜中心点(或圆)与准直镜的反射中心对齐,用准直望远镜准直副镜。
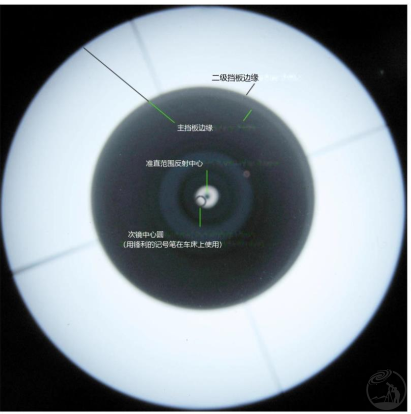
然后,通过使内部挡板反射同心来准直主镜。下图显示了与 Deep Sky Instruments RC10一起使用的 Takahashi 准直镜。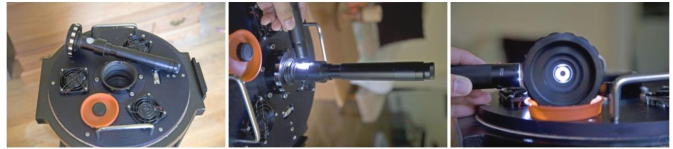
下图显示了准直前通过准直镜的视图。准直镜通过主挡板管观察副镜。通过主挡板管看到的所有东西都是副镜中的反射。因此,想象一下您位于副镜的中心,向后看准直镜会很有帮助。当您从示波器中心进一步观察时,您将看到主挡板的内部。越过主挡板的边缘,您将看到主镜以及其中反射的任何东西。次挡板的边缘同时在主镜和次镜中反射。第一个准直步骤是调整次镜,以便准直镜的中心落在副镜中心圆的中心内。最后一步是调整主镜,使所有挡板边缘同心。
传统方法的问题
传统的准直方法参考系统内的多个物理点,并依赖于某些可能正确或可能不正确的假设。
首先,该方法需要次镜上有一个中心点(或圆)。该点通常位于次镜的物理中心。假设次镜的机械中心也是次镜的光学中心。
此外,该方法参考主挡板和副挡板的边缘。它假设两个挡板都与 OTA 同轴,并且系统光轴最终也将与这些挡板同轴。至少在某种程度上,这两种情况都不会是这样。这就是为什么经常有报道称,当使用传统方法瞄准瞄准镜时,其性能仍然不佳。相反,当使用准直望远镜观看时,准直良好的瞄准镜可能看起来并不准直。
以下是一些具体问题示例:
副镜没有中心点。- 不能使用准直镜来准直次镜。
次镜中心光斑并不代表镜的光学中心。- 将导致次镜误准直。
主镜光学中心不在范围中心。- 光轴和机械轴不能共线。
次镜中心点不在次镜单元的中心。- 第二步将失败或导致误准直。
主要或次要挡板未精确居中。- 第二步将失败或导致误准直。
瞄准镜在运输过程中发生碰撞,随后进行准直,但性能不佳。- 谁知道问题可能是什么?
虽然可以在工厂调整瞄准镜,使其在光学和机械上都准直,但没有多少制造商会在调整主挡板的对准之后这样做。许多依靠其制造公差来产生良好的结果,虽然在许多情况下可能是这种情况,但当使用传统方法时,准直很少是最佳的。一些制造商允许次镜在次镜单元内平移,这很好,但对于那些没有经过培训的人来说,进行这种调整可能会出现问题。最后,如果副镜中心标记不正确,则无法使用传统方法获得最佳准直。传统方法的几个优点包括易于准直以及白天准直。
观察准直的另一种方式
如果仅考虑主镜和次镜,则只需将主镜指向次镜的光学中心并将次镜指向主镜的光学中心即可准直系统。无论任何其他反射镜特性如何,例如挡板位置或次镜中心点,这都是正确的。它还独立于光学系统与 OTA 的关系。这就是它的样子。
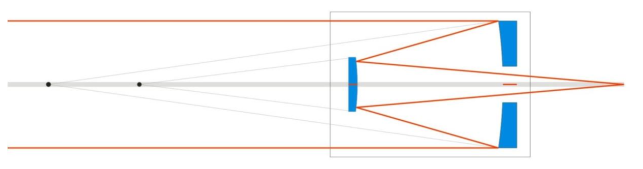
该系统是完美准直的。相对于另一个镜子移动任一镜子都会改变完美的准直。现在,我们可以将次镜中心点、主挡板、次挡板和准直镜添加到系统中。如果做得理想的话,这就是它的样子。
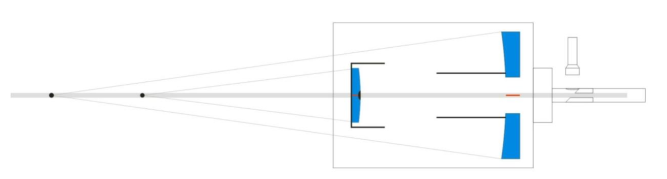
现在,通过准直镜观察,副镜光斑将看起来居中,并且挡板同心。但是这些项目的任何其他重要定位都会导致系统看起来不准直的视图(即使系统是准直的)。为了使系统看起来更好(通过准直镜)而对主镜和/或次镜进行的任何调整都将导致系统不准直。一些制造商会准直其瞄准镜,然后对挡板进行调整,并可能将副挡板居中。这可以有所帮助,但可能还不够。如果在运输过程中发生变化,几乎无法知道发生了什么变化或如何修复它。
准直程序概述
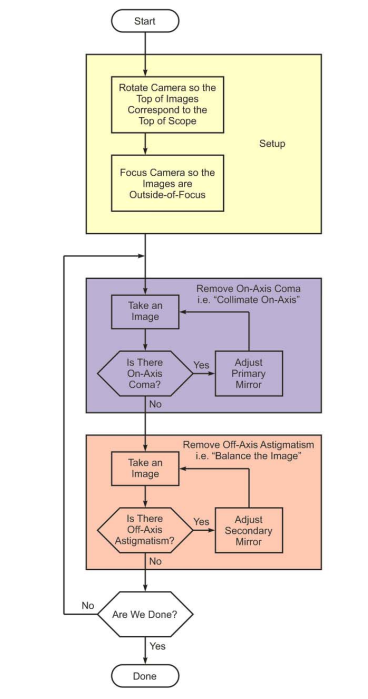
该方法中使用的程序是首先通过调整主镜倾斜/倾斜来消除轴上慧差。然后,通过调整副镜倾斜/倾斜来消除离轴散光。该过程是迭代的并且快速收敛到良好准直的条件。下面的流程图说明了此过程。本文档后面给出了程序详细信息。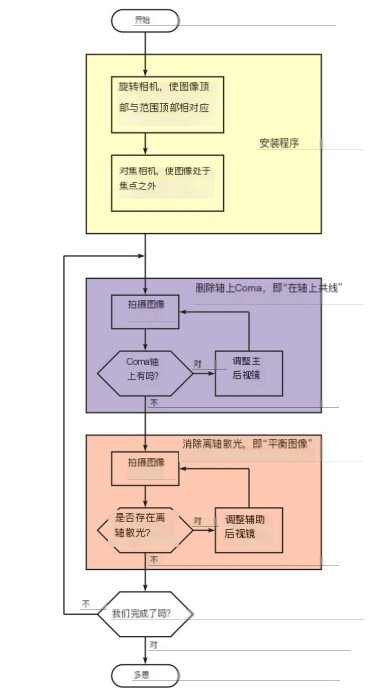
理论
许多卡塞格伦准直程序依赖于次镜上的中心标记。然后使用准直望远镜将次级的光轴与仪器的光轴对齐。这仅在有准直望远镜的情况下才有效。这也是有问题的,因为次镜上的中心点通常标记其机械中心而不是其真实的光学中心,而真实的光学中心通常是不同的。
当前某些程序的另一个问题是它们依赖内部挡板环和边缘作为准直光学器件的指南。如果机械和光学方面一切都很完美,那么这种方法就可以发挥作用,但这种情况很少见。例如,如果主挡板稍微离轴或产生的光轴不完全位于 OTA 的机械中心,则同心挡板环将不会产生准直光学器件。
主镜和次镜的机械中心几乎都不是光学中心。它们的变化可能是每英寸几千到十分之一或更多。组装仪器时常常没有考虑到这一点。这里介绍的过程对此非常宽容。光学分析和实践经验表明,在存在这些类型的问题时,该过程会产生良好的结果。该过程既不依赖于辅助中心点也不依赖于内部挡板对准。它执行简单并且收敛速度快。它在整个成像区域产生良好的结果。
该过程的最终结果是针对感兴趣区域的最佳准直系统。它产生平衡的结果。也就是说,任何残留的光学伪影都被最小化并且在整个图像中保持一致。星形图像仅在图像的一个角被拉长的情况通常是图像不平衡的结果。
此过程利用的大多数卡塞格伦的一个特征是主镜和次镜的调整如何相互作用。具体来说,对副镜的调整将影响离轴散光和最终图像的整体平衡。它还会影响轴上彗差。然而,主镜的调整主要影响轴上慧差。这产生了一个快速收敛的过程。还值得注意的是,通过对次镜进行调整而引起的任何彗差都可以通过对主镜进行相同但相反的调整来消除。
关于镜面光学中心的注意事项
镜子的机械中心不一定是其光学中心。这是一个问题,因为没有直接的方法来确定镜子的光学中心。理想情况下,您希望主镜和次镜的光学中心位于 OTA 的机械轴上。大多数制造商会将每个镜子的机械中心放置在该轴上,并在机械可控的公差范围内进行。
这里描述的新方法不直接依赖于镜子的光学中心。相反,准直是根据相对于 CCD 图像传感器优化图像质量的程序进行优化的。
准直调节螺丝
在讨论准直程序之前,应了解机械调整。 Deep Sky Instruments RC14C Ritchey-Chrétien Astrograph将用作示例。主镜和次镜的倾斜/倾斜可以通过三组准直螺钉来调节。每组螺钉与其各自的镜单元中心间隔 120 度。主准直螺钉标记为 A、 B 和 C,从从 12 点钟位置遇到的第一组螺钉开始,从示波器后部看,顺时针移动。同样,辅助准直螺钉标记为 X、 Y 和 Z,从从 12 点钟位置遇到的第一组螺钉开始,从示波器后部看顺时针移动。如下所示。这是从示波器背面看到的所有六组准直螺钉。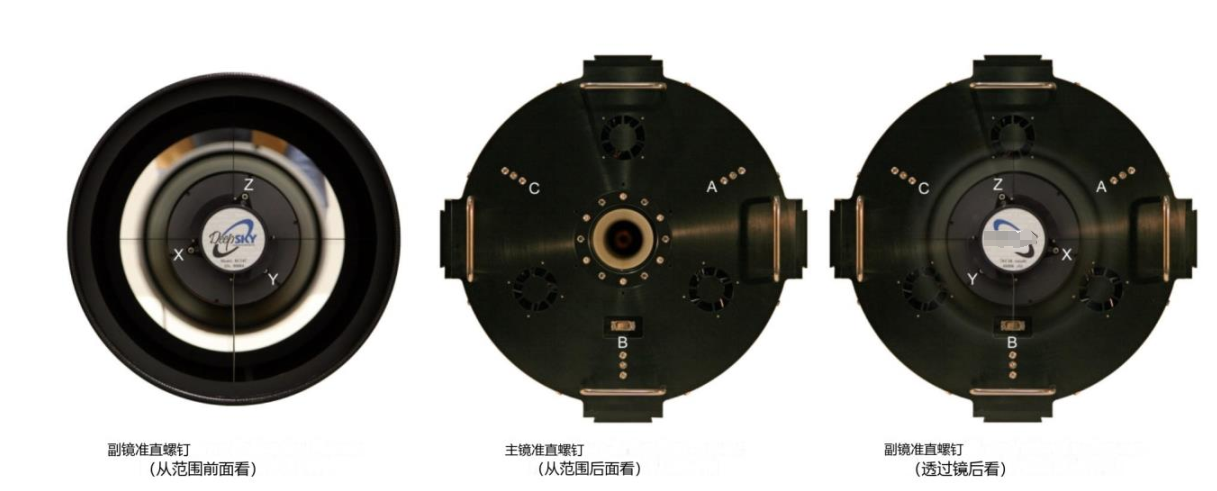
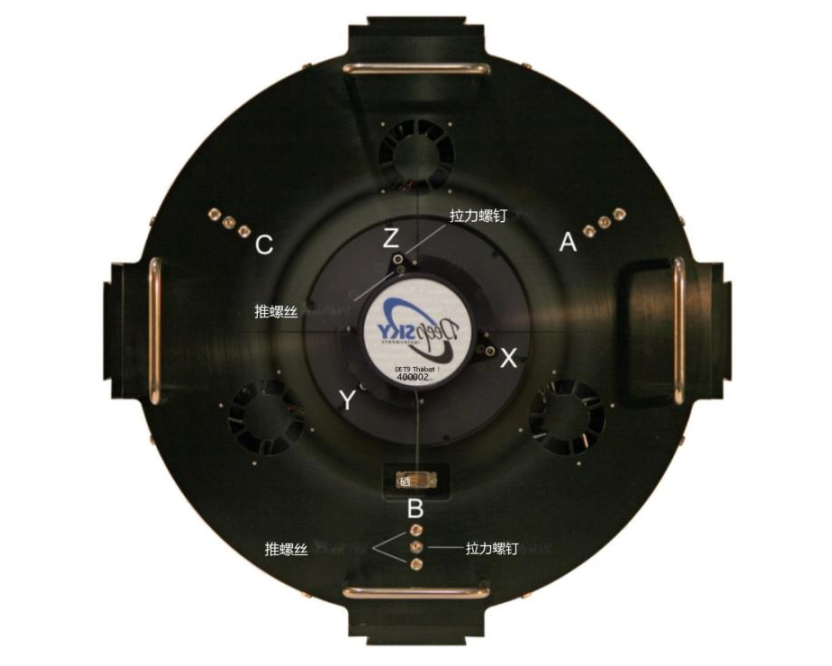
每组主镜准直螺钉由三个单独的螺钉组成。中心螺钉是拉螺钉,周围的两个螺钉是推螺钉。应以大致相等的力拧紧推螺钉。这最大限度地减少了主镜单元中引起的任何扭矩。每组次镜准直螺钉由两个单独的螺钉组成。外侧的螺钉是拉螺钉,内侧的螺钉是推螺钉。如上图所示。
调整准直螺丝
为了倾斜/倾斜主镜或次镜,可以调整一组或多组准直螺钉。为了将镜单元的一侧移近一组螺钉,按顺序松开推螺钉并拧紧拉螺钉。为了使镜单元的一侧远离一组螺钉,松开拉螺钉并拧紧推螺钉。只需要轻到中等的力就可以牢固地固定镜单元,但如果观察到准直不稳定,则可能需要更大的力。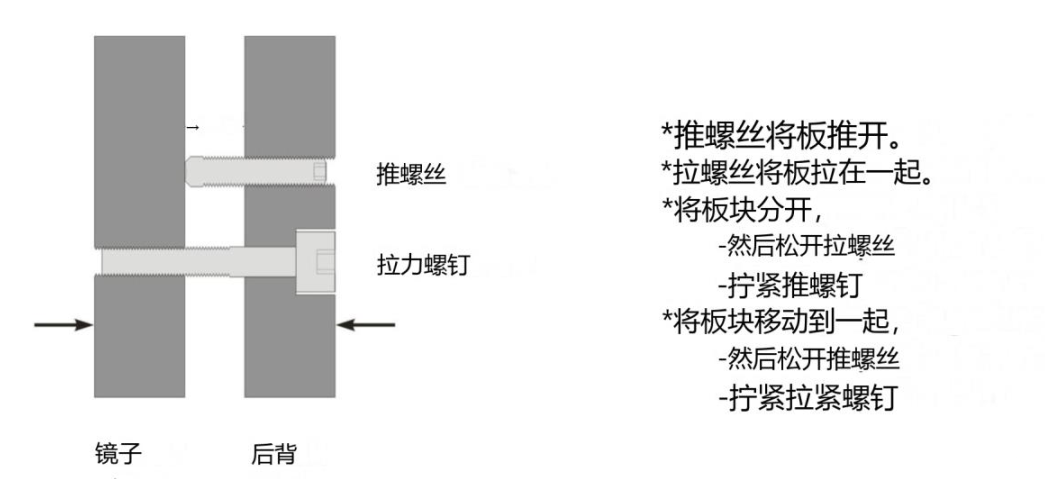
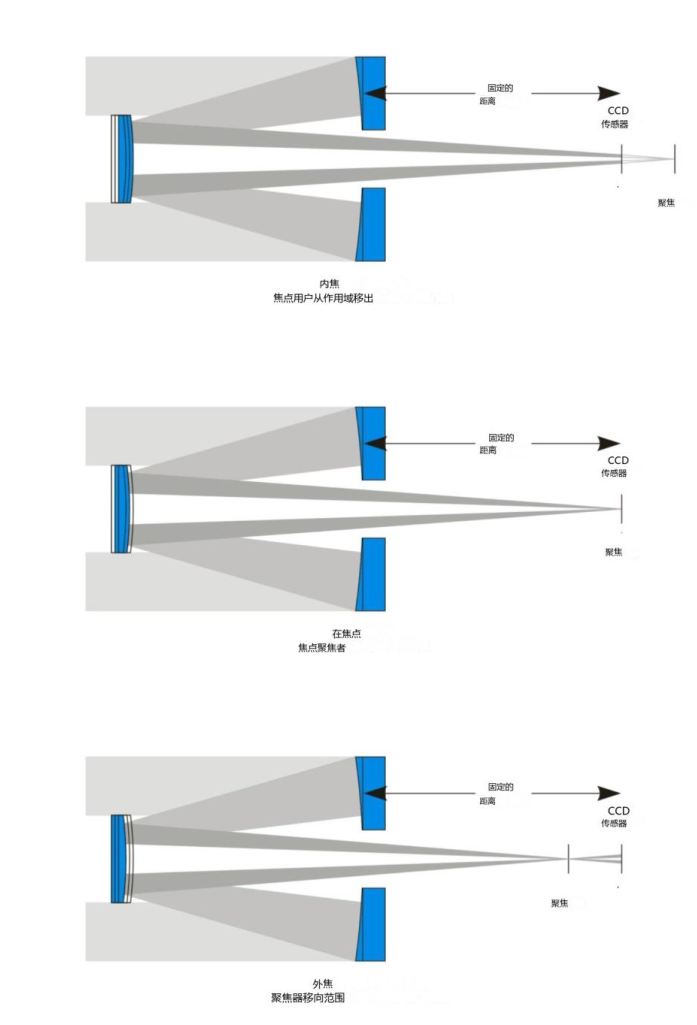
调焦位置和方向准直调整
基于在焦外拍摄的失焦图像。下面最后一张图片对此进行了说明。要拍摄焦外图像,您需要将焦平面从对焦位置向内移动。这意味着副镜应移向副聚焦器并远离主镜。调焦控制器上的IN 按钮可实现此目的。对于 RC14C,焦外图像通常是在距离对焦位置 50 次计数时拍摄的。使用外部调焦器的瞄准镜会将 CCD 图像传感器移离瞄准镜。
相机图像传感器方向
建立相机图像传感器和望远镜之间的关系非常重要。这种关系是由当示波器孔径的象限被遮蔽时观察到的焦外星像定义的。根据我们的惯例,望远镜孔径掩模的位置被定义为从望远镜的背面看到的位置。如果您的图像与光圈掩模的位置不对应,则需要翻转和/或旋转您的图像。或者,您可以旋转相机以获得所需的结果。必须在光圈掩模处于不同位置的情况下拍摄两张图像,才能确定相机的方向。
调整主镜以消除轴上慧差
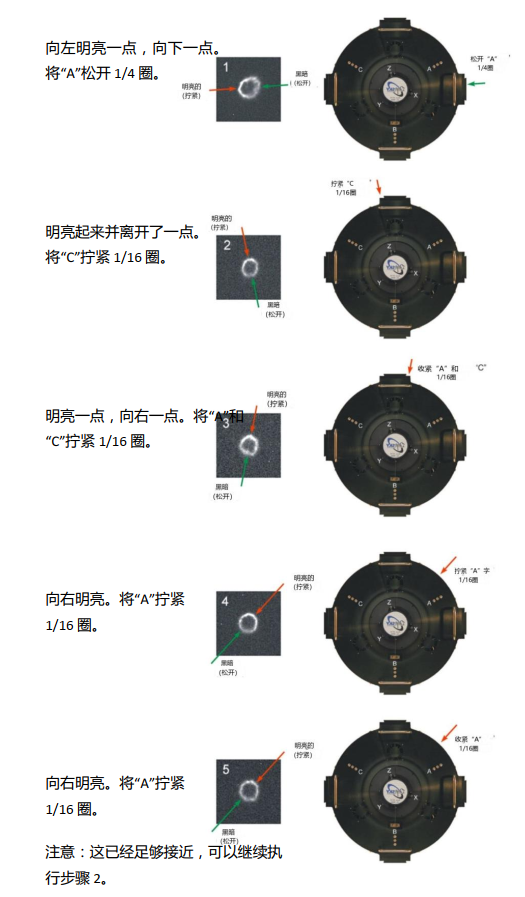
有多种技术可以使用主镜准直轴上彗差。任何你觉得舒服的方法都可以。我们使用的方法是查看轴上、离焦恒星图像的相对图像强度。当恒星照明不均匀时,就会出现慧差。
规则: 拧紧与图像亮面相对应的主拉螺丝。
通过调整主镜消除慧差的示例这是消除轴上彗形像差的示例。选择一颗距离图像中心相当近的星星。调整焦点,使图像在焦点外大约有 50 个计数。这并不重要。以下图像是根据所选恒星的亮度进行的一秒曝光。每次曝光后都会对主镜进行调整。

平衡图像
在准直良好的旋转对称光学系统中,任何生成的图像也应该是旋转对称的。我们称之为“平衡”。在平衡系统中,离轴恒星将均匀聚焦以产生精确的恒星图像。这当然是我们的目标。
平衡的图像
这是平衡图像的示例。
左侧图像是使用 DSI RC14C( 14.5 英寸, f/7.0, 2557 毫米)和KAF16803( 9μm x 9μm, 4096x4096) CCD 拍摄的焦外图像。尺寸约为 0.85° x 0.85°。曝光时间为 10 秒,但范围可以为 5 到 30 秒。安装座应该很好地跟踪并且极轴对齐,这一点很重要。不要依赖短曝光来获得不良的极轴对准。
右图是由九张星图合成的,如左图所示。周边恒星的离轴距离大致相同,以便进行比较。右侧所有的周边恒星图像都大致呈圆形且相似。它们是旋转对称的。也就是说,从图像中心的角度来看,它们看起来都大致相同,表明平衡良好。轴上星像5被均匀照亮,表明没有明显的轴上慧差。该系统准直良好。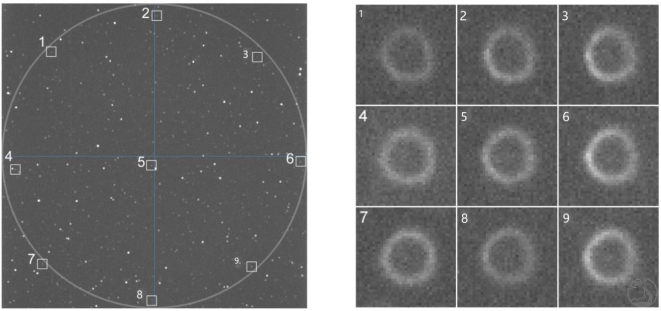
不平衡的图像
相比之下,这是一个不平衡图像的示例。
左边的图像是在与上一张图像相似的条件下使用相同的系统拍摄的。曝光时间为30秒。
周边星星不再是圆形的,而是变得更加椭圆形。它们不是旋转对称的,表明存在离轴散光。轴上星像-5 被均匀照亮,表明没有明显的轴上慧差。
每颗椭圆形恒星都有一个长轴(长轴,以红色表示)和一个短轴(短轴)。这些周边恒星的长轴与图像中心的关系将表明系统未准直的方向。星图的椭圆程度也表明了系统偏离准直的程度。
如果您在围绕不平衡图像的周边前进时观察离轴椭圆形恒星的长轴,您可能会注意到长轴总共旋转了 180 度。此外,在图像周边的某个位置,主轴将指向图像的中心。我们称这些为“尖”星。在“尖”星星的正对面,您会发现星星的短轴指向图像的中心。我们称这些为“扁平”恒星。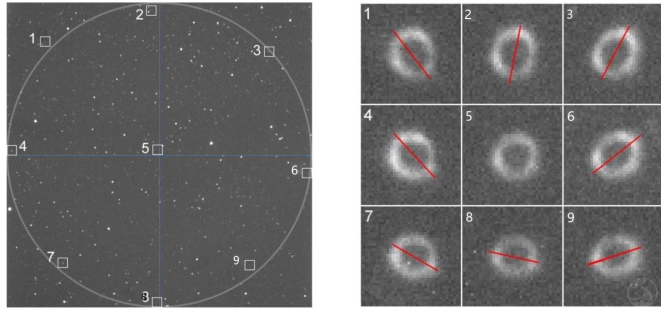
圆形、椭圆形、尖形和扁平星形
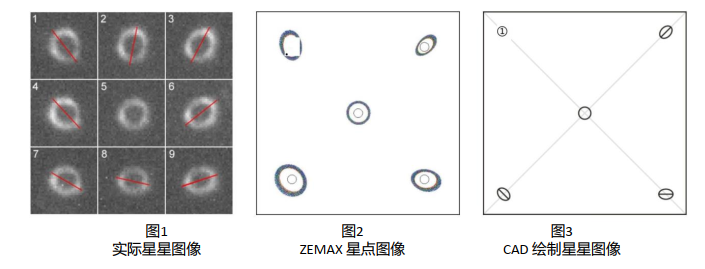
让我们介绍另一种方式来说明椭圆形周边恒星及其与图像中心的关系。我们将使用之前的不平衡示例。这是同一事物的三种表示。
图1-实际的周边和中心恒星图像。
图2-ZEMAX 光线追踪程序生成角星和中心星的点图。该系统通过将次镜的右上方(从瞄准镜的后部看到)移离主镜而实现非准直。然
后调整主镜以消除轴上彗差。
图3-类似准直系统的角星和中心星的 CAD 绘图。
我们还定义一些术语。所有这些术语均指焦外周边恒星图像。
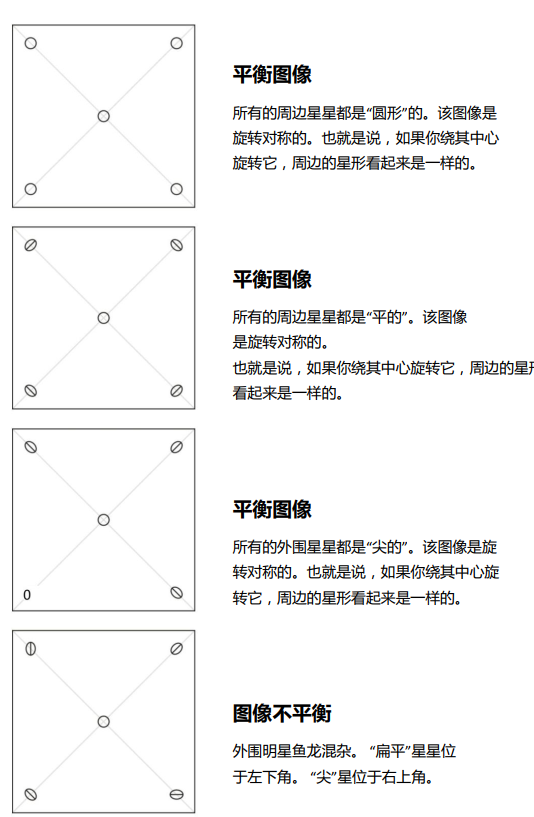
圆星:星形是圆形的。
椭圆星:星形为椭圆形。
尖星:星形是椭圆形的,其长(长)轴指向图像的中心(在本例中为右上角)。
平星:星形是椭圆形的,其短轴指向图像的中心(本例中的左下角)。
重要提示:术语“尖”和“平”是相对术语。并非所有具有离轴散光的仪器都会有尖星与扁平星相对。有些将具有“更尖”和“不太尖”的恒星图像,而另一些将具有“更平坦”和“不太平坦”的恒星图像。
平衡图像示例
以下是三个平衡图像的示例和一个不平衡图像的示例
调整副镜以消除离轴散光
副镜用于消除离轴散光并平衡图像。此调整应在轴上慧差消除后进行。
规则: 拧紧与平星对应的辅助拉螺丝。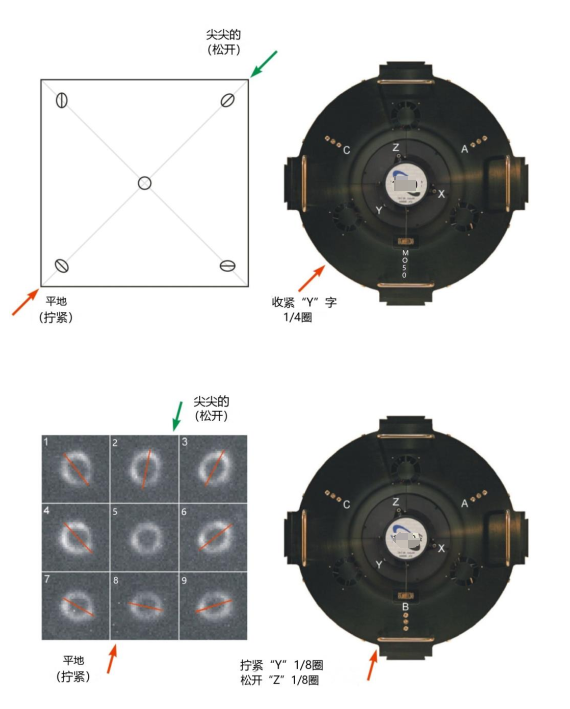
准直规则总结主镜
准直规则:
拧紧对应于亮部的拉螺丝星点。
这将使星星远离正在拧紧的准直拉螺钉。使用此规则可以消除轴上彗形像差。
次镜准直规则:
拧紧与平星对应的拉力螺钉。
这会将星星移离正在拧紧的准直拉螺钉。使用此规则可以消除离轴散光。
公约概要:
所有参考都是从显示器背面看到的。
所有失焦图像均在失焦状态下拍摄(大约 50 幅)。使用最适合您的方法。
放置相机,使图像的顶部对应于显示器的顶部。
拧紧“A”表示拧紧拉螺丝。
曝光时间为 5 至 30 秒。
技巧和窍门
散焦足以清楚地看到恒星的形状和特征。
靠近焦点会产生更小的星形甜甜圈,但可以看到更微妙的细节。
曝光通常为 5~30 秒,以避免跟踪问题。
您的瞄准镜安装座必须跟踪良好,并且极轴对准必须良好。即使对于短曝光也是如此。
如果可能的话,拍摄银河系中的星空。 这将有助于平衡图像。
保持一致以避免混乱。遵守定义的约定。
瞄准合理的高度(例如,与地平线成 70 度角)。
拧紧一个位置的拉螺钉相当于松开相反位置的拉螺钉。
二次调整通常会引入轴上慧差。对初级进行同等但相反的调整通常会消除它。一旦您掌握了该程序,此技巧可以节省时间。
此过程对于大孔径仪器和广角相机最有用。
调整准直螺钉将改变镜子间距,从而改变焦点。较大的调整可能需要您调整对焦器。
最好仅使用两个准直螺丝组来准直主镜。如果不调整其中一个,就可以保证镜子不会随着时间的推移而移动。这也适用于次镜。我们建议“B”和“Z”螺钉保持不变。
最终准直应通过拍摄对焦图像来验证。
在花费大量时间进行准直之前,请确保您的望远镜在指向天空中的不同位置时能够保持准直。
此过程可在整个成像场(包括光学系统中可能存在的任何倾斜)上提供最佳结果。如果使用旋转器,您将需要消除相机和旋转器之间的任何相对倾斜。
当您接近最佳准直时,瞄准镜和/或安装座的其他小问题将会产生更大的影响。可能需要更加挑剔的眼光。评估更接近焦点的图像也可能有所帮助。
仅在图像一侧显示拉长星星的聚焦图像通常不是最佳准直,可以进行改进。
平衡但仍包含伪影的图像可能存在其他问题,例如安装、光学、跟踪或极轴对准。
准直调整将改变您的焦点。如果您的准直调整幅度较大,您可能需要调整焦点。
一旦您熟练后,该过程大约需要十到十五分钟。
瞄准瞄准镜的大部分时间都花在等待图像下载上。在准直主星时,使用分箱和感兴趣区域来定位轴上恒星并对其进行成像有助于节省时间。
如果您记录了准直调整,则可以在必要时返回到已知状态。