
宇宙如此绚丽多彩,忍不住就想去拍一拍。而当我们不仅仅满足于拍到,还想拍得更好的时候,比如想拍得更清晰锐利一些,这时候就需要给自己的望远镜配置一个电动调焦器。
可能许多人和我当初一样,以为买了电调,就可以轻轻松松解决对焦问题,拍出清晰锐利的星点、星云等目标了。然而现实很骨感,我很清楚地记得当时是折腾了几个晚上才成功地完成了自动对焦。而今年以来通过和一些大佬朋友们的交流,对自动对焦了解更多了。这里把我踩过的坑或者了解的知识做点总结,希望可以给爱好者朋友们作个参考。

SH2-155 洞穴星云
拍摄:王辰 处理:黑郁金香
天文摄影自动对焦过程中一个非常重要、却又容易让人忽略的设置,便是回差补偿。本文以目前常用的深空摄影拍摄软件SGP、NINA为例,重点讲述如何在这些软件的自动对焦功能中做好回差补偿。
总结
不知不觉中把文章写的比较长,因此为了节省大家的时间,干脆把总结放在最前面。您可以对文章的其它内容选择性阅读或者不阅读。
- 不同软件对回差补偿方法有不同的命名,或者没有命名,但实际回差补偿方法主要有两种,即绝对值(Absolute)方法和超出值(Overshoot)方法。
- 强烈建议使用超出值补偿方法。
- 如果调焦器的回差均匀、对称,刚性良好,装配正常,并不需要追求绝对的小回差,即使回差略大一些,仍然可以使用超出值方法将回差消除得很好。
- 可以测量一下自己的设备回差大小,以便在回差补偿时输入合适的值。
- 使用超出值补偿方法时,输入的值不需要精确就能够很好地消除回差,但输入的值需要比实际回差值大一些,建议在实际回差值的150%~200%左右。
- 如果使用Oasis Focuser可离合电动调焦器,可以在SGP、NINA等软件中不设置回差补偿,而统一在Oasis Focuser的ASCOM Setup对话框中设置回差补偿。
- 使用电调焦时,可以将调焦筒往上移动时的方向(远离地面的方向)定义为IN,往下移动时的方向(靠近地面的方向)定义为OUT,回差补偿方向选择IN。
- 不同软件对回差补偿方向的定义有所不同,需加以甄别。当使用NINA并且回差补偿选择超出值方法时,IN/OUT输入框中只需在其中一个填入回差补偿数值,另一个填0。请勿两个都填回差补偿数值。
一、回差补偿方法
1、NINA中的回差补偿方法
NINA提供了两种回差补偿方法,即绝对值(Absolute)和超出值(Overshoot)。查阅NINA的官方文档,其对这两种补偿方法的解释如下(注:本文会摘录一些英文原文,因为对于这些国外软件来说,原始的英文会表达得更准确,可以给大家提供更准确的参考。同时我也作一些翻译,可以对比阅读):
Absolute: When the focuser changes directions, an absolute value will be added to the focuser movement. Backlash IN: when the focuser changes from moving outwards to moving inwards the Backlash IN value will be added; Backlash OUT: when the focuser changes from moving inwards to moving outwards the Backlash OUT value will be added
翻译如下
绝对值:当调焦器改变移动方向时,给调焦器的移动添加一个绝对数值。Backlash IN:当调焦器从向外移动变为向内移动时,“Backlash IN”中设置的值会被添加到移动步数中;Backlash out:当调焦器从向内移动变为向外移动时,“Backlash OUT”中设置的值会被添加到移动步数中
这里的“Backlash IN”和“Backlash OUT”是指NINA的Options->Equipment->Focuser设置界面中的输入框,如图1-1所示。
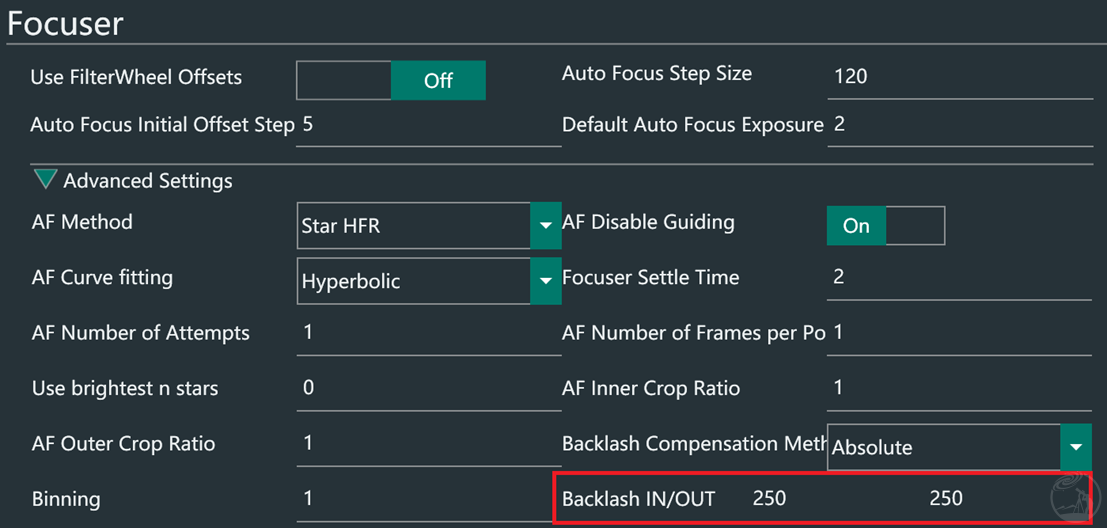
图 1-1
绝对值方法的意义很好理解,就是如果实际回差是N步,往反方向走的时候就多走N步,以消除回差。
Overshoot: This method will compensate for Backlash by overshooting the target position by a large amount and then moving the focuser back to the initially requested position. Due to this compensation the last movement of the focuser will always be in the same direction (either always inwards or always outwards)
超出值:此方法先将调焦器移至超过目标位置较大数值的一个位置,然后将调焦器移回最初要求的位置,以此来补偿回差。使用这种补偿方法,调焦器的最后一次移动将始终朝同一方向(始终向内或始终向外)
注:Overshoot也可以翻译为过调、过冲,似乎这两个翻译更形象准确。
这个方法乍看有点不太好理解,需要用说人话的方式来解释一下。那么它到底是什么意思呢?我们举一个例子。假设调焦系统的回差是200步,并且向内和向外的回差相同。我们选择Overshoot回差补偿方法,在回差补偿OUT输入框中填300,IN输入框中填0,如图1-2所示。
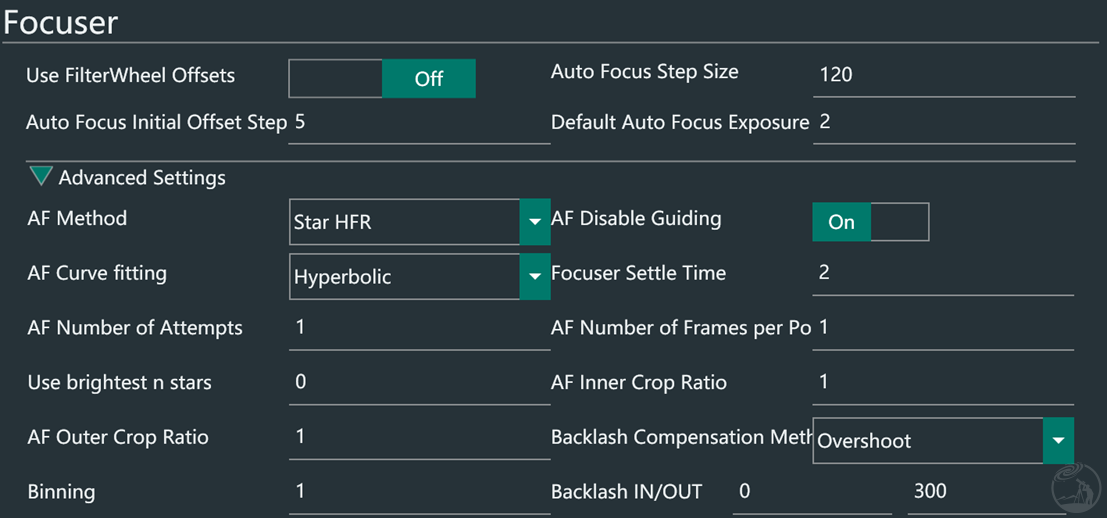
图 1-2
假设电调焦当前位置是在1000步,姿态向内,并且向内的方向没有回差。我们现在想把调焦座往外移动50步,那么它的移动过程是这样的:第一阶段先往外移动300+50,即350步,此时调焦器到达1350步的位置,第二阶段往内移动300步,到达1050步的位置,如图1-3所示。
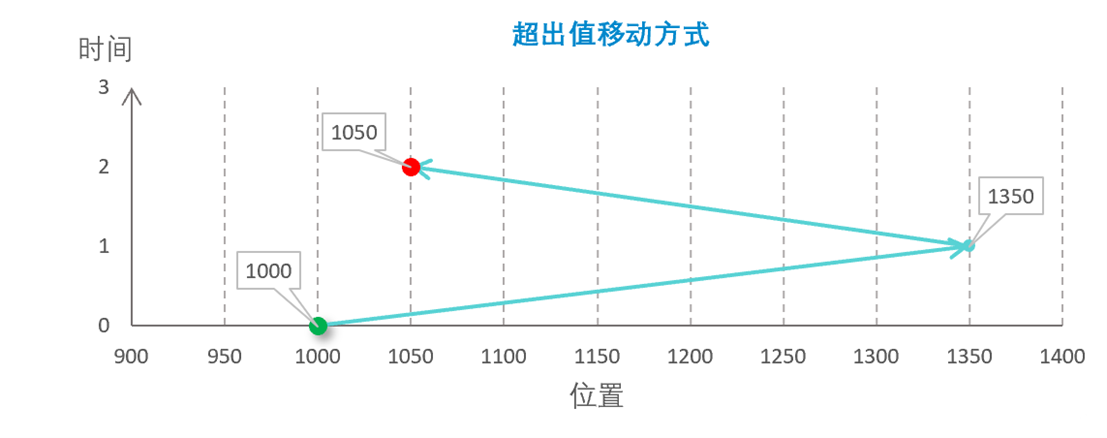
图 1-3
在第一阶段往外走的时候多走了300步(即回差补偿数值),这个数值超过了实际回差大小,因此不管实际需要往外走的步数是多少(这里实际需要往外走的步数是50步),这些多走的步数,一部分将往外的空程全部走完,此时往外是没有空程的,另一部分带动调焦座往外实际移动。而第二阶段往内走300步的时候同样如此,一部分将往内的空程走完,另一部分带动调焦座往内实际移动,并且移动的步数和前面往外走的步数相同,正好相互抵消。而当中我们所需要的往外走的50步,也实际带动调焦座往外走了50步,这正是我们所需要的。
这时我们可以发现这样几个事实:
1、最后到达的位置是1050步,确实是一开始就希望到达的位置
2、调焦座实际往外移动了50步,这也是我们希望调焦座移动到的位置
3、调焦器最终的姿态仍然是往内,并且往内没有回差
因此,超出值补偿方法是一个十分简单并且有效的方法。与绝对值方法相比,它的奇妙之处在于不需要准确知道回差的大小,就可以将回差消除得很好。
需要指出的是,在此种情况下,如果需要电调焦往IN方向走一些步数,那么不需要做补偿,直接往IN方向走指定的步数即可。
2、SGP中的回差补偿方法
SGP软件中回差补偿方法只有一种,并不像NINA那样有多种可以由用户选择,而且它并没有对其所采用的回差补偿方法命名。我们在其“Focuser”设置对话框中可以看到与回差补偿相关的设置,如图1-4所示。
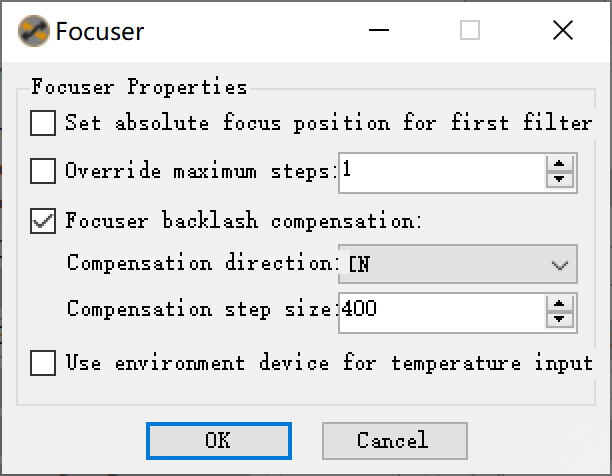
图 1-4
SGP对其所采用的回差补偿方法有如下的解释:
Compensation will be invoked when the move is opposite of the compensation direction. For example if you select “IN” then on every “OUT” move the compensation will be invoked such that the focuser will be moved out an by the amount specified and then in by that amount to remove the backlash.
当移动与补偿方向相反时,将使用回差补偿。例如,如果您选择“IN”作为回差补偿方向,那么在每次往“OUT”方向移动时,将使用回差补偿,此时调焦器将按指定值往OUT方向多移动一些,然后再往IN方向移动相同的值,以此来消除回差。
可见SGP所采用的补偿方法实际就是NINA中的Overshoot方法。
3、Sharpcap中的回差补偿方法
如图1-5所示,Sharpcap的回差补偿方法有4个选项:

图 1-5
其中第一项无回差补偿,第二项由ASCOM驱动处理回差补偿。Sharpcap文档中并没有说明第二项是如何操作的,我觉得第一项和第二项差不多,都是Sharpcap不做处理。文档中也没有说明第三项是如何操作的,但看上去就是NINA中的Absolute方法。而第四项就是Overshoot方法。
4、Oasis Focuser ASCOM驱动中的回差补偿方法
一些调焦器的ASCOM驱动也提供了回差补偿功能。以Oasis Focuser离合电动调焦器的ASCOM驱动为例,在它的Setup对话框中,可以看到和回差补偿相关的设置,如图1-6所示。
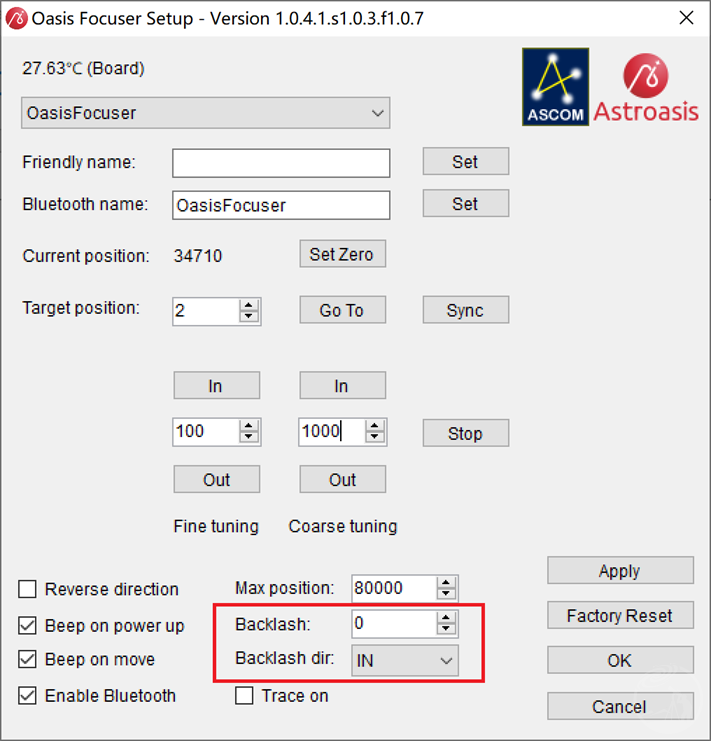
图 1-6
和SGP一样,它也没有对其采用的回差补偿方法命名,但它实际采用的是Overshoot回差补偿方法。
如果希望在ASCOM驱动中使用回差补偿,那么应当在应用软件中停用回差补偿,也就是在Sharpcap的回差补偿设置中选择选项”None”或者“Handled by ASCOM Driver”,或者在NINA/SGP中将相关回差补偿数值设为0,否则将会使得事情复杂化。
5、使用何种回差补偿方法
正如在NINA的文档中说的那样:
Absolute is indicated for focusers with relatively small backlash and requires a more accurate measurement of the amount of backlash, while Overshoot is more forgiving and can be safely used for most focusers.
意思是绝对值方法适用于回差相对来说比较小,并且回差数值被精确测量的情况,而超出值方法具有更大的宽容度,可以在大多数情况下安全使用,即使回差没有被精确的测量。
就我自己来说,无论自动对焦还是手动对焦的时候都是采用Overshoot回差补偿方法。因为回差大小很难被精确测量,而如果用绝对值回差补偿方法,那么回差测量的误差,足以对对焦效果产生较大的影响。因此也强烈建议大家用Overshoot回差补偿方法,而本文后续介绍的测试也都是使用的Overshoot补偿方法。
这里想着重说明两点:
1) 得益于Overshoot这种简单且有效的方法,我们并不需要调焦器或者调焦座的回差绝对的小。回差即使稍微大一些,Overshoot方法也可以通过向内和向外移动,将回差巧妙地消除掉。当然如果回差特别大,这也是不对的,应当检查是否哪里出现了问题。
2) 不同软件的Overshoot回差补偿方法,对回差补偿的方向的定义会有所不同。在SGP中,如果选择回差补偿方向为IN,则每次向IN方向移动时,不需做回差补偿,直接移动相应的步数即可,向外移动时做回差补偿,移动完后调焦器同样是在往内的方向,因此这里的回差补偿方向可以理解为每次移动后调焦器的最终方向。Oasis Focuser的ASCOM驱动中的回差补偿也是如此。而在NINA中,如果Backlash IN输入框中输入数值,OUT输入框中不填数值,则向IN方向移动时做回差补偿,移动完后调焦器的方向为OUT,往OUT方向移动时,不做回差补偿,直接向OUT方向移动相应的步数,这种情况下,每次调焦器最终的方向都是往OUT。因此在SGP/Oasis中选择的补偿方向和NINA中选择的方向,它们的意义是相反的。而Sharpcap的Overshoot方法中,对补偿方向是如何定义的,我并没有做相关的实验。
大家可能也注意到,对Overshoot补偿方法,回差补偿的方向在SGP/Oasis/Sharpcap中都是一个下拉框来选择IN或者OUT。而在NINA中是IN/OUT两个输入框,并且两个输入框中都可以输入数值。实际上在NINA的这两个输入框中,只需在其中一个输入数值即可,另一个不需要填。那么如果两个都填了会怎么样呢?NINA的文档中并没有说明,我实际测试发现会产生非常奇怪的结果,在文章后面的内容中再详细说明。我觉得在这个地方NINA做得不太好,容易产生混肴,可能它仅仅是为了和Absolute复用输入框。
在本文中,回差补偿方向统一使用SGP/Oasis命名法。如果我们说回差补偿方向选择IN,那么对于NINA来说,就是在OUT输入框中输入补偿数值,而在IN输入框中输入0。
二、深空摄影自动对焦过程
这里我们先讲一下深空摄影自动对焦的过程,因为下一节所讲的回差大小的估算方法和自动对焦过程有一些关系。
以NINA为例,其过程是这样的:
- 在当前位置进行一次曝光,并计算星点HFR。在最终焦点位置的HFR将会和这里的HFR做比较,以确认最终焦点位置是否更好
- 将调焦器往外移动,移动的步数为Auto Focus Initial Offset Steps乘上Auto Focus Step Size。
- 将调焦器往内移动,每次移动Auto Focus Step Size,并进行曝光、计算星点HFR。
- 持续向内移动直到找到一个HFR的最小值,并且在最小值的两端,最少有Auto Focus Initial Offset Steps个采样点。如果最小值的右侧采样点不足,则NINA将往外移动到最右侧的点,然后重新进行自动对焦,每次移动Auto Focus Step Size,直到在最小值的右侧有足够多的采样点。
- 根据采样点的位置和HFR作拟合来找出最佳焦点,然后移动到计算出的焦点位置。
- 在焦点位置处做一次曝光,计算HFR,然后将其和第一步中的HFR作比较。如果焦点位置处的HFR比初始位置处的HFR差了15%或更多,则自动对焦程序被视为失败,调焦器将返回到初始位置,或者重新进行一次自动对焦。
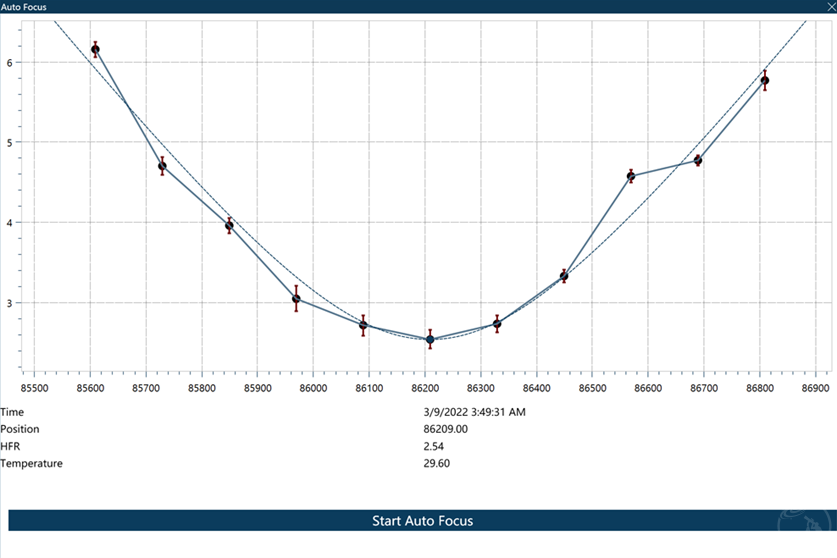
我们以NINA一次成功的自动对焦来举例说明。如图2-1所示,在这次自动对焦中,Auto Focus Initial Offset Steps为5,Auto Focus Step Size为120,回差补偿选择Overshoot,补偿方向为IN,补偿值为400(IN输入框中填0,OUT输入框中填400),当前位置为12222。
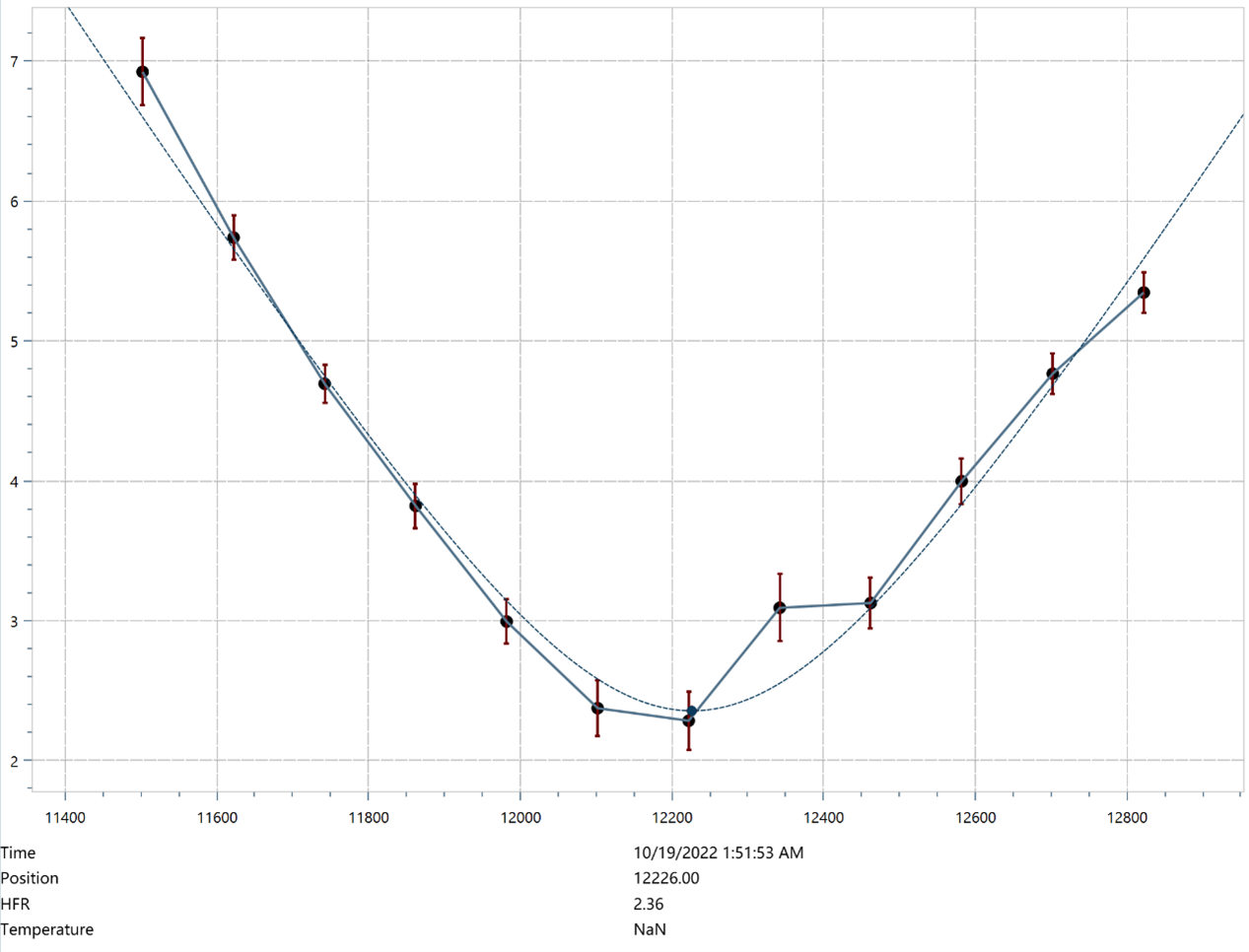
图 2-1
移动过程如下:
Current: 12222
Move: 13222
Move: 12822
Move: 12702
Move: 12582
Move: 12462
Move: 12342
Move: 12222
Move: 12102
Move: 11982
Move: 11862
Move: 11742
Move: 11622
Move: 11502
Move: 12626
Move: 12226
将移动过程用图表的方式来展示,如图2-2。
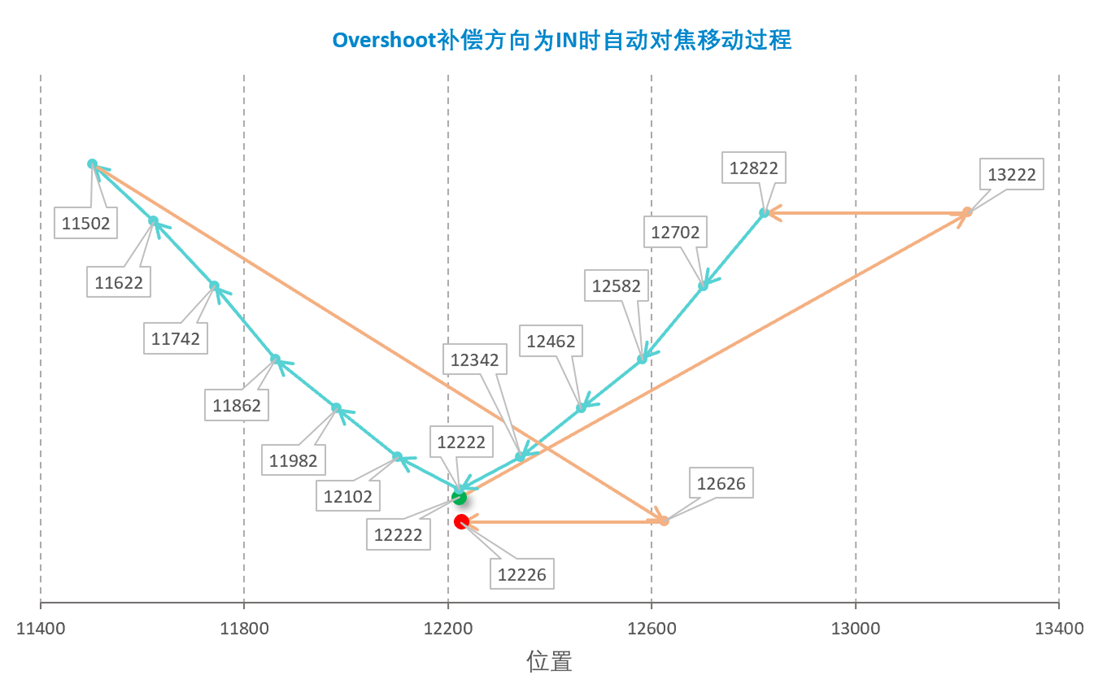
图 2-2
其中绿色的点为起点,红色的点为终点。橙色的线段表示带有回差补偿的往外移动的过程,青色线段表示不需要做回差补偿的往内移动的过程。
图表中的纵坐标引用了对焦过程中的HFR值,但并没有实际意义,在纵坐标方向上将图表做成这种形状,只是为了将图表和对焦曲线图做成类似的形状,方便将两者对比查看。
从图上可以清晰的看出,在最开始往外移动以及最后回到计算出的焦点位置的时候,做了回差补偿。
三、回差大小的估算
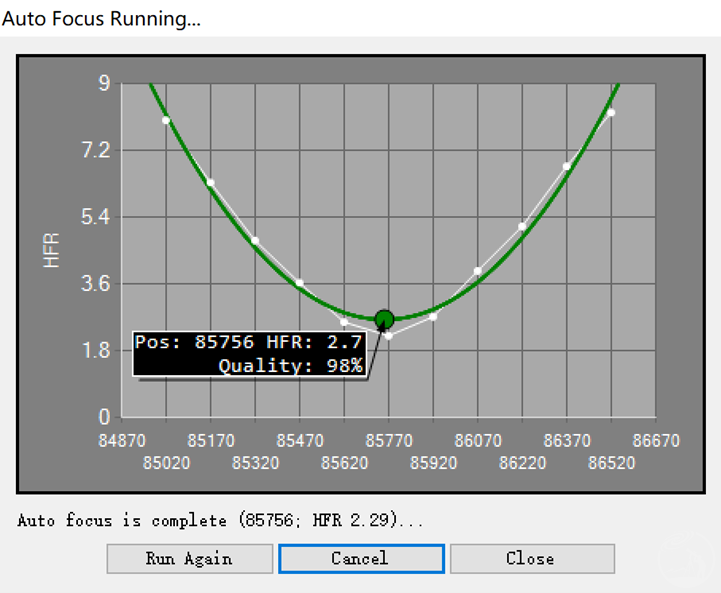
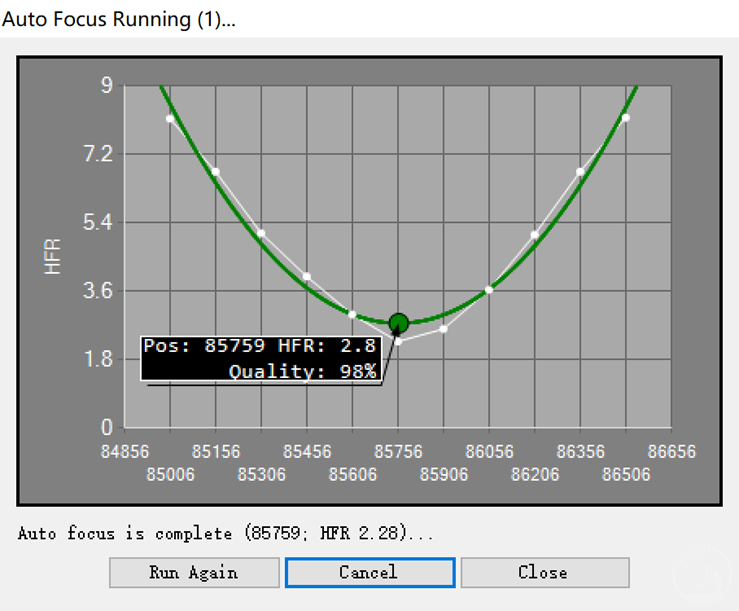
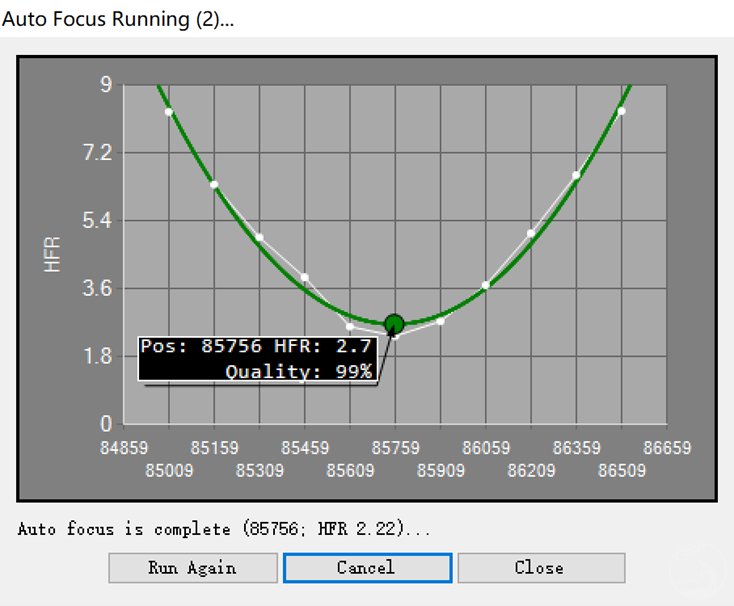
有多种方法可以来估算回差的大小。这里介绍其中一种方法,即利用深空摄影自动对焦时的曲线来判断回差大小。
首先不使用任何回差补偿,然后使用SGP或者NINA运行一次深空摄影自动对焦,得到一条曲线。由于未使用回差补偿,在曲线右侧最开始的一段,虽然电调焦显示的位置在变,但实际走的是空程,调焦座实际的位置并没有变,因此拍摄得到的星点HFR值非常接近,右侧显示的是一条接近水平的线段,线段的长度大小即为回差的大小,如图3-1所示(图中回差大小大概为450步)。当然这样得到的回差大小并不十分精确,但对于Overshoot回差补偿方法来说已经足够了。
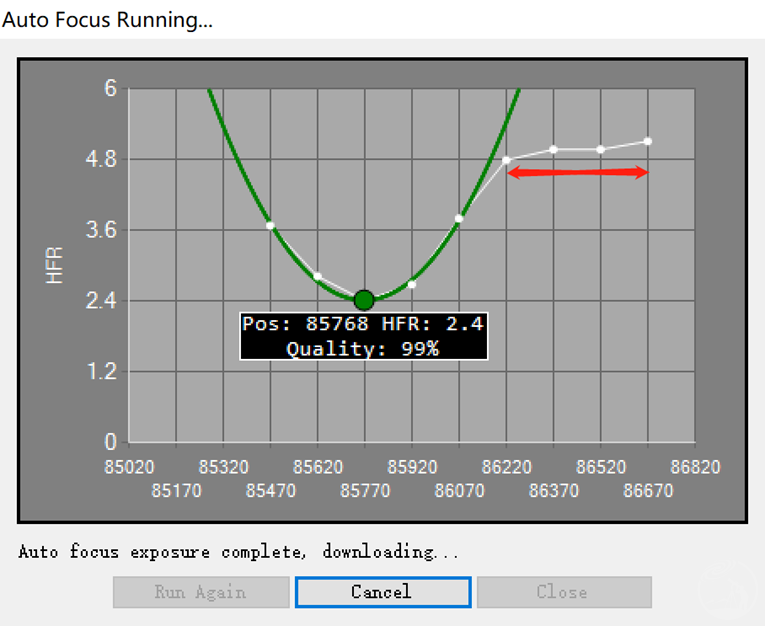
图 3-1
回差大小的估算是一件可能许多人没有做、但应当做的事情,因为这将关系到回差补偿做得是否正确。
当然还有其它的方式来估算回差,比如可以通过切换移动方向来观察手轮。更精确的测量方法可以参考我们的另一篇文章《望远镜调焦系统回差的准确测量方法》。这篇文章可以在以下链接阅读:
https://mp.weixin.qq.com/s/DUhD0P_VGg6KDuInHjK7YA
https://istarshooter.com/article/detail/76
四、回差补偿设置
如果未设置回差补偿或者设置不对,那么至少会产生两个问题:
- 曲线右侧出现水平的线段,导致曲线无法拟合,自动对焦失败。或者即使拟合,拟合后的结果也与实际不符合,导致计算出来的焦点不准,这种情况甚至还不如对焦失败,因为这会产生误导,让人忽视了真正的问题所在。
- 曲线拟合成功、最后一步回到焦点位置时,未准确回到计算出来的焦点位置,导致对焦不准
因此我们需要正确地设置回差补偿。NINA/SGP/Sharpcap或者Oasis Focuser的ASCOM驱动的Overshoot回差补偿方法,其设置都很简单,都只有一两个下拉框或者输入框,用于确定回差补偿方向和回差补偿大小。具体设置可以参考图1-2、1-4、1-5、1-6。
如果使用Oasis Focuser可离合电动调焦器,可以在SGP、NINA等软件中不设置回差补偿,而统一在Oasis Focuser的ASCOM Setup对话框中设置回差补偿。
回差补偿方向在文章的前面已经讲过,在文章后面也会再进行一些解释。那么回差补偿大小如何填呢?
我们再看一下NINA的文档对此的说明:
For Overshoot, once the user has determined a rough backlash value, this can be increased by an extra 50% and input as IN or OUT compensation. Since this method is very forgiving a trial-and-error procedure is also possible, by using progressively larger compensation values until the AF routine behaves properly and no sign of backlash is shown in the AF curve.
NINA建议填入的数值为估算出的回差的150%,并且注意观察对焦曲线的右侧不要出现平缓的线段。150%这个数值跟我的使用习惯差不多,我建议这个数值可以填回差的150%~200%左右,具体可以根据对焦曲线的完美程度来选择。
五、回差补偿方向选择
使用Overshoot回差补偿方法时,回差补偿方向如何选择更加合适呢?我们分几种情况来讨论一下。
1、折射望远镜
对于折射望远镜,比如APO这类望远镜,拍摄时调焦座以及相机等拍摄设备位于镜子下方,在重力作用下它们有往下拉动调焦座的趋势。如果拍摄设备比较沉重或者调焦座本身的阻尼不够,调焦桶有可能缓慢往下掉落,导致焦点不稳定。而电机在工作时,即使不运转,也具有保持的功能,也就是在对焦完成后,电机可以拉住调焦座。
那么对于这种情况,该如何设置回差补偿的方向呢?
我们首先需要定义一下移动方向。以APO为例,我们做如下定义:
- 调焦筒往靠近物镜的方向移动,称往内移动,相应的,调焦筒往远离物镜的方向移动,称为往外移动
- 电调焦驱动调焦桶往内移动时,电调焦步数(或者位置)逐渐变小,称电调焦往内移动,相应的,电调焦驱动调焦桶往外移动,电调焦步数(或者位置)逐渐变大,称电调焦往外移动
为简略起见,我们将电调焦驱动调焦筒往内/往外移动,也称为电机往内/往外移动。
对于APO来说,调焦筒往内移动时也是在朝上移动,往外移动时也是在朝下移动。
如果2和1矛盾,即电调焦驱动调焦筒往内移动时,电调的步数变大,则可以对电调焦做一个“反向”的操作。一般电调的软件界面会提供这个功能。比如图5-1,以Oasis Focuser为例,如果2和1矛盾,则勾选“Reverse Direction”,就可以使得2和1一致。
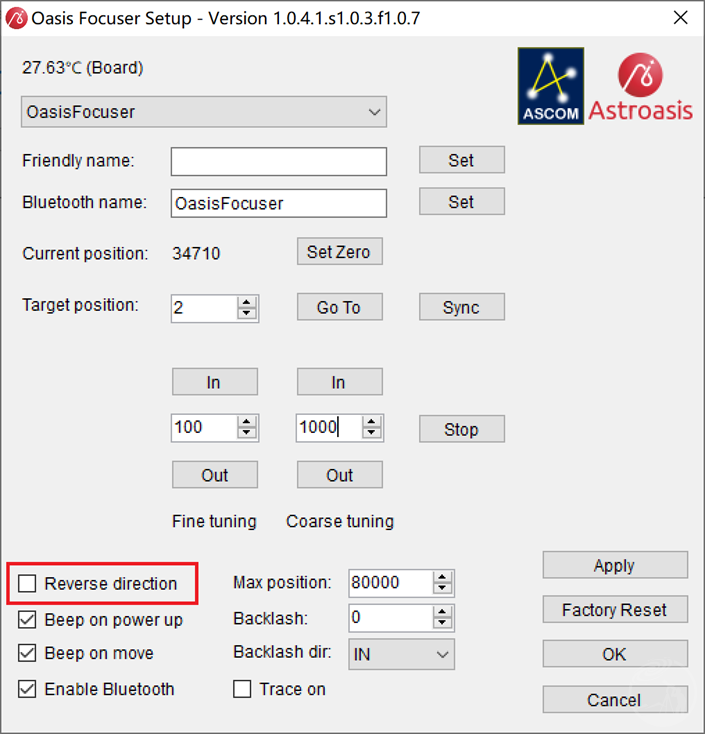
图 5-1
接下来我们分析一下移动方向和焦点保持的关系。
如果电机最后一次移动是往内移动,并且往内移动的时候移动的步数足够多,从而完全消除了往内移动时的回差,那么当电机停止移动时,调焦筒在重力作用下有往外移动的趋势,这个趋势施给电机的力与电机往内移动时调焦筒施给电机的力方向相同,而此时这个方向上已经没有回差,因此利用电机的保持功能,调焦筒的位置可以保持稳定。
如果电机最后一次移动是往外移动,并且往外移动的时候移动的步数足够多,从而完全消除了往外移动时的回差,那么当电机停止移动时,想象一下如果有一种神秘的力(比如传说中的反重力,哈哈)试图推动调焦座往内移动,那么这时候调焦筒和电机之间是没有回差的,回差是在另一个反向上。而实际上调焦筒在重力作用下有往外移动的趋势,由于在这个方向上存在回差,电机无法保持调焦筒的稳定。只有当调焦筒掉落一段距离,消除了回差之后,电机才能保持住调焦筒。
因此,为了在自动对焦完成、调焦座到达焦点位置时能够保持焦点位置稳定,我们应当让电机最后一次移动的方向为IN。结合前面讲述的各大软件回差补偿方法,可知在Overshoot的回差补偿方向中选择IN方向。
2、牛顿反射式望远镜
对于牛反这类望远镜,调焦座和镜筒不在同一个轴上。拍摄的时候,既可以将调焦座置于镜筒上方,也可以置于镜筒下方。如果调焦座位于镜筒下方,我们可以将调焦筒往靠近镜筒移动的方向定义为向内移动,其反方向定义为往外。那么其它操作方式和前面APO望远镜的操作方式相同。
如果调焦座置于镜筒上方,该如何设置回差补偿方向呢?
如果我们仍然将调焦筒往靠近镜筒移动的方向定义为向内移动(这是正常的使用习惯),此时重力对移动方向的影响也发生了改变。为了抵抗重力保持焦点的稳定,电机最后一次移动的方向应当是往外(也就是朝上)。
因此,回差补偿方向可以选择OUT。但是这会带来一个问题。
以NINA为例,NINA自动对焦时,星点采样是从外往内移动开始采样。当回差方向选择IN时,每次往内走,都会做回差补偿,电机最后的移动方向是往外。因此自动对焦过程中,电机的移动过程是一个蛇形走步。
我们以下图所示的一次补偿方向为OUT的自动对焦来说明。自动对焦曲线如图5-2所示。

图 5-2
移动过程如下:
Current: 12226
Move: 12826
Move: 12306
Move: 12706
Move: 12186
Move: 12586
Move: 12066
Move: 12466
Move: 11946
Move: 12346
Move: 11826
Move: 12226
Move: 11706
Move: 12106
Move: 11586
Move: 11986
Move: 11466
Move: 11866
Move: 12826
Move: 12946
Move: 13066
Move: 13186
Move: 12134
Move: 12534
其中用红色表示的位置,会实际拍摄星点计算HFR值,而黑色的位置,只是在回差补偿过程中临时到达的位置,在这些位置不会拍摄星点。
将移动过程用图表来表示,如图5-3。
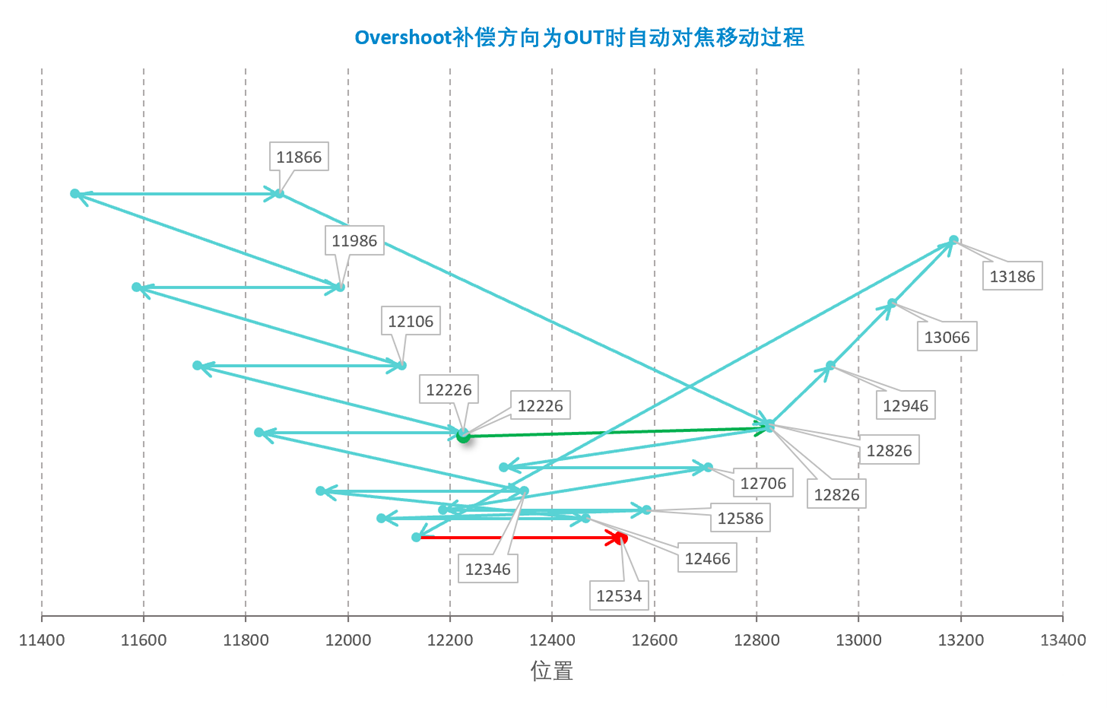
图 5-3
其中绿色的点为起点,红色的点为终点。
可见在移动过程中,每次向内移动都做了一次回差补偿,移动过程很曲折,而不像图2-2所示的回差补偿方向为IN时那样清爽。虽然说这样蛇形移动未必就一定会有问题,但回差补偿毕竟也是不得已而为之的操作,在自动对焦的过程中,如果调焦座准确移动的同时,能够少做甚至不做回差补偿,岂不是更好吗?
顺便说一下,在图中可以看出,自动对焦时,由于一开始曲线右侧采样点的数量不足,在曲线最左端的位置采样完成后,又移动到了右侧12826、12946、13066、13186这几个位置进行采样,然后才进行拟合、计算焦点位置。这验证了第二节“深空摄影自动对焦过程”中的步骤4描述的情况。这时候整个移动过程也更复杂。由此也可见如果调焦器本身的回差控制不好、或者软件上对回差设置不正确,对对焦效果的影响将会很大。
那么该如何设置回差补偿,来避免蛇形走步呢?将回差补偿方向和自动对焦星点采样移动方向保持一致,就可以避免蛇形走步。由于NINA和SGP都是由外往内采样,因此可以将回差补偿方向设为IN。
然而根据我们前面的讨论,如果只是改变回差补偿方向,那么虽然没有蛇形走步了,但是电机最后移动的方向和我们需要的不一致,无法很好的保持焦点。
如果改变自动对焦时星点采样方向,从内往外采样,回差补偿方向选择OUT,就可以既避免蛇形走步,又能在对焦完后保持焦点位置。但遗憾的是NINA和SGP都不支持从内往外采样。
不过我们还是有办法来解决这个问题。解决方式也很简单,就是重新定义方向。其实我们需要的是每次电机最后一次移动都是朝上移动,也就是朝上移动的时候不用做回差补偿,因此如果以SGP对回差补偿的命名方式来看,回差补偿方向应当选择“朝上”。为了避免蛇形走步,那么自动对焦的时候星点采样方向应该是从下往上。因此,不管是哪种望远镜,始终可以将调焦筒往上的方向(远离地面的方向)定义为往内,往下的方向(接近地面的方向)定义为往外。这时候,回差补偿方向还是选择IN。
3、NINA中回差补偿方向设置
如果在NINA中选择Overshoot,并且两个输入框中都填补偿数值,会怎么样呢?首先从Overshoot补偿原理上可知不需要也不应该在两个输入框中都填回差补偿数值。NINA的文档中也没有说明两个都填的情况下会发生什么。不过怀着好奇心,我仍然去测试了一下这种情况。由于我们本身是电调的开发者,因此很容易来查看在这种情况下NINA是如何来移动电调的。只需在电调的ASCOM驱动中加一些log,看NINA在自动对焦过程中对电调焦发送了哪些移动指令即可。结果发现,它以一种非常奇怪的方式在移动。
以图5-4所示的一次自动对焦为例。在这次自动对焦过程中,IN/OUT输入框中都填了400,步长120。
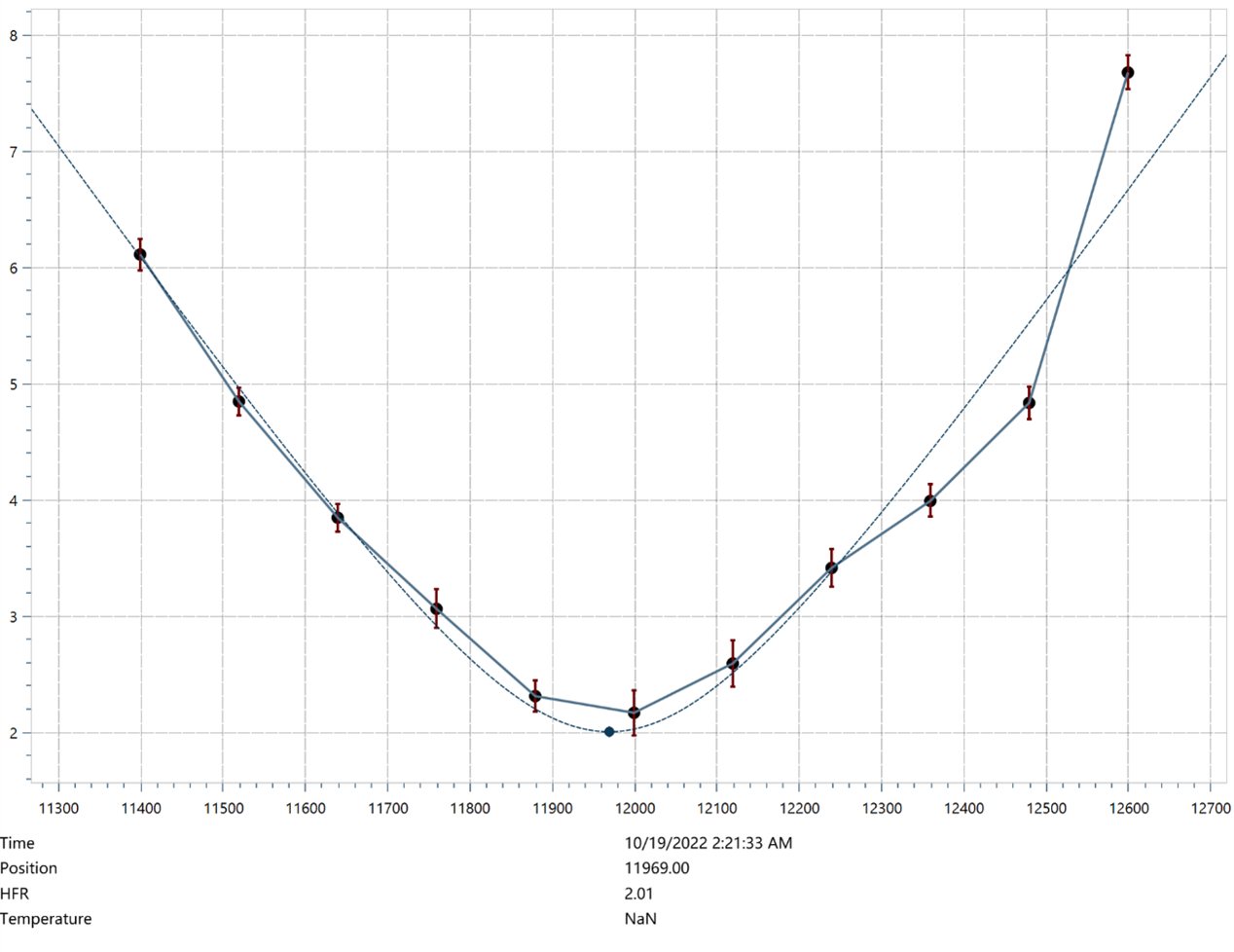
图 5-4
移动过程如下:
Current: 11999
Move: 12999
Move: 12599
Move: 12079
Move: 12479
Move: 11959
Move: 12359
Move: 11839
Move: 12239
Move: 11719
Move: 12119
Move: 11599
Move: 11999
Move: 11479
Move: 11879
Move: 11359
Move: 11759
Move: 11239
Move: 11639
Move: 11119
Move: 11519
Move: 11099
Move: 11399
Move: 12369
Move: 11969
其中用红色表示的位置,会实际拍摄星点计算HFR值,而黑色的位置,只是在回差补偿过程中临时到达的位置,在这些位置不会拍摄星点。
将移动过程用图表来表示,如图5-5。
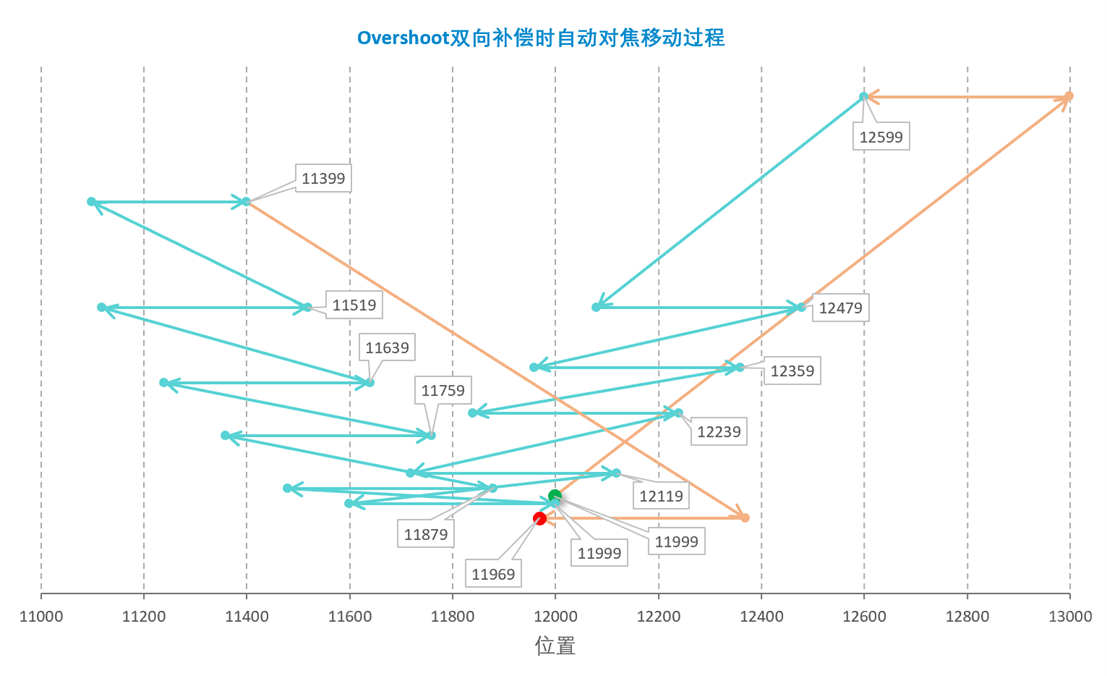
图 5-5
其中绿色的点为起点,红色的点为终点。橙色的线段表示带有回差补偿的往外移动的过程,青色线段表示带有回差补偿的往内移动的过程。带标注的位置,会实际拍摄星点计算HFR值,不带标注的位置只是在回差补偿过程中临时到达的位置,在这些位置不会拍摄星点。
可见无论是往内还是往外移动,每一次移动都在做回差补偿。这样的走步,不停地抖腿拌腿,往好了说如同美妙的阿根廷探戈舞,往坏了说那就是鬼畜。
事实上这样移动也是错误的。以12479这个位置为例,在其上一个位置(12599)往IN方向走的时候,是没有回差的,但仍然做了回差补偿,先往IN方向走了520步,此时带动调焦座完全往IN方向走了520步,然后再往OUT方向走了400,但往OUT方向走的时候,当中一部分是回差,调焦座实际往外移动的距离不到400步,结果就是从12599移动至12479的时候,调焦座往内实际移动的距离大于120步,在12479这个位置采样的星点的HFR值会低于预期,这符合对焦曲线上表现出来的结果。这样就会影响曲线的拟合和对焦的准确性。最后一步回到焦点位置的时候也有类似的问题。
因此,在NINA中选择Overshoot补偿方法时,不应该在两个输入框中都填补偿数值,而是只需填一个。
题外话
Oasis Focuser不仅可离合,在其它很多方面也具备很强的创新性和优异的性能。它采用两颗齿轮来传动。现代齿轮广泛采用渐开线齿廓,其开拓者正是数学之神欧拉。
从纯数学的角度来看,渐开线齿轮在转动时,只要重合度大于等于1,那么主动轮在匀速转动时,从动轮任意时刻的瞬时速度都恒定。也就是齿轮传动的速度是均匀的。反映到电调焦上,就是电机每一步都能使得调焦座移动相同的距离(当然这里只是数学上的分析,忽略了刚性以及各种误差)。而且即使齿轮中心距略有偏差,传动比仍然不变。
重合度大于等于1,用通俗的话来说就是两颗齿轮正常啮合。Oasis Focuser在设计上保证了其无论装在哪款望远镜或者调焦座上时,都可以使得两颗齿轮轻松无级啮合、重合度大于1。
得益于齿轮传动的均匀性、金属的刚性,以及高减速比电机,在正确地做了回差补偿后,使用Oasis Focuser进行深空摄影自动对焦,可以获得很好的对焦效果。
在我们进行的测试中,多次重复对焦,最终焦点位置仅仅相差很少的步数,而在我们的测试设备上,每一步的分辨率为0.8μm。并且,这样的测试结果可以多次重现。

/ END /
苏州墨空视觉技术有限公司
为天文观测和摄影爱好者
提供优质的产品和服务
